You might also like
- UDS Vehicle Diagnostics in AUTOSAR SoftwareDocument10 pagesUDS Vehicle Diagnostics in AUTOSAR SoftwareEmbitel TechnologiesNo ratings yet
- UDS Protocol: Automotive Diagnostics Made EasyDocument40 pagesUDS Protocol: Automotive Diagnostics Made EasySimhadri Thumati100% (2)
- UDS Protocol Implementation in An ECUDocument6 pagesUDS Protocol Implementation in An ECULayon Bruno100% (4)
- Understand Autosar in 40 CharactersDocument13 pagesUnderstand Autosar in 40 Charactersanils469No ratings yet
- Autosar NotesDocument25 pagesAutosar NotesSantoshNo ratings yet
- Autosar PDFDocument125 pagesAutosar PDFChethan100% (1)
- Message Authentication For Can Bus and Autosar Software ArchitectureDocument135 pagesMessage Authentication For Can Bus and Autosar Software ArchitecturebitzabladeNo ratings yet
- MICROSAR ProductInformation enDocument92 pagesMICROSAR ProductInformation ensrikanthboddunaNo ratings yet
- Com Stack Configuration PDFDocument99 pagesCom Stack Configuration PDFkakathi100% (1)
- Kpit Autosar HandbookDocument74 pagesKpit Autosar HandbookBogdan Alin100% (1)
- Startup: Davinci DeveloperDocument30 pagesStartup: Davinci DeveloperVinay Logun100% (1)
- AUTOSAR and Functional SafetyDocument26 pagesAUTOSAR and Functional Safety조용규No ratings yet
- AutosarDocument170 pagesAutosarSantoshNo ratings yet
- Vector Webinar AUTOSAR Basics 20121009 enDocument34 pagesVector Webinar AUTOSAR Basics 20121009 enVinu Avinash100% (4)
- AUTOSAR Basic Training PDFDocument62 pagesAUTOSAR Basic Training PDFchris100% (3)
- BootloaderDocument91 pagesBootloadersaika_1982No ratings yet
- AUTOSAR Software Engineering PraktikumDocument10 pagesAUTOSAR Software Engineering PraktikumFarwa ZahidNo ratings yet
- AutoSAR MethodologyDocument19 pagesAutoSAR Methodologyestraj1954No ratings yet
- Uds - Iso14229-1Document15 pagesUds - Iso14229-1Vinay KumarNo ratings yet
- AUTOSAR SWS DiagnosticCommunicationManager PDFDocument553 pagesAUTOSAR SWS DiagnosticCommunicationManager PDFyuvarajnarayanasamyNo ratings yet
- UDS Protocol Implementation in Automotiv PDFDocument6 pagesUDS Protocol Implementation in Automotiv PDFMinhaj NaimNo ratings yet
- Data Sheet ECU-TESTDocument2 pagesData Sheet ECU-TESTmeetbalakumarNo ratings yet
- Multi-core ECU Design using AUTOSARDocument50 pagesMulti-core ECU Design using AUTOSARDeependra MagardeNo ratings yet
- Vehicle Networks: CAN-based Higher Layer ProtocolsDocument46 pagesVehicle Networks: CAN-based Higher Layer ProtocolsSunil Kumar Singh100% (4)
- Presentation 1 CUBAS AUTOSAR OverviewDocument28 pagesPresentation 1 CUBAS AUTOSAR OverviewtjdyhdfhNo ratings yet
- 03 Autosar TutorialDocument69 pages03 Autosar TutorialTarun Kumar100% (4)
- An and 1 112 Canoe TutorialDocument25 pagesAn and 1 112 Canoe TutorialShaddai Sg67% (3)
- UDS Protocol Implementation in Automotiv PDFDocument6 pagesUDS Protocol Implementation in Automotiv PDFviernes06No ratings yet
- VTESTstudio ConceptManual enDocument48 pagesVTESTstudio ConceptManual enAntonio li causi50% (2)
- 4 - Ensure Freedom From Interference FFI For ASIL Applications - TASKINGDocument19 pages4 - Ensure Freedom From Interference FFI For ASIL Applications - TASKINGDumitru IngeauaNo ratings yet
- Simulink-Targetlink Datatypes Defnt ProblemDocument16 pagesSimulink-Targetlink Datatypes Defnt ProblemmonisivaNo ratings yet
- AUTOSAR and ARINC653Document50 pagesAUTOSAR and ARINC653bnd1uNo ratings yet
- Vector CANoeDocument7 pagesVector CANoeZaferNo ratings yet
- Lesson19 Autosar PDFDocument170 pagesLesson19 Autosar PDFBura RoxanaNo ratings yet
- CHAPTER 1: AUTOSAR Fundamentals Topics CoveredDocument14 pagesCHAPTER 1: AUTOSAR Fundamentals Topics CoveredSujit KumarNo ratings yet
- OSEKDocument32 pagesOSEKkalscribNo ratings yet
- Autosar Communication Stack Implementation With Flexray: Johan Elgered Jesper JanssonDocument55 pagesAutosar Communication Stack Implementation With Flexray: Johan Elgered Jesper JanssonXuân ToànNo ratings yet
- Autosar PPTDocument10 pagesAutosar PPTRahul WaliNo ratings yet
- Diagnostics 2 Raetz LectureDocument28 pagesDiagnostics 2 Raetz LectureSajan Jose100% (1)
- Diagnostics Over IP For AUTOSARDocument41 pagesDiagnostics Over IP For AUTOSAROmar Elshal100% (2)
- Embedded Coder AUTOSARDocument474 pagesEmbedded Coder AUTOSARKjfsa Tu100% (6)
- An-IDG-1-010 How To Create UDS Protocol ServicesDocument8 pagesAn-IDG-1-010 How To Create UDS Protocol Servicestotor42No ratings yet
- Matlab AUTOSAR GuideDocument20 pagesMatlab AUTOSAR GuideAdrian MendozaNo ratings yet
- Interview Questions-1Document41 pagesInterview Questions-1ChaitanyaBv100% (2)
- Design Process Hardware Autosar: Present Problems The Autosar StandardDocument3 pagesDesign Process Hardware Autosar: Present Problems The Autosar StandardJnsk SrinuNo ratings yet
- CANoe QuickStartGuide PDFDocument80 pagesCANoe QuickStartGuide PDFVlad ChioreanNo ratings yet
- Declaring and Accessing CAN Messages in CAPLDocument4 pagesDeclaring and Accessing CAN Messages in CAPLAhmedJbeli100% (1)
- UDS Protocol Diagnostics CommunicationDocument6 pagesUDS Protocol Diagnostics CommunicationaravindNo ratings yet
- What Is UDS Protocol - Unified Diagnostic Service in Automotive - EmbitelDocument5 pagesWhat Is UDS Protocol - Unified Diagnostic Service in Automotive - EmbitelkrishaNo ratings yet
- Road Vehicles Diagnostic Ommunication Technology and ApplicationDocument2 pagesRoad Vehicles Diagnostic Ommunication Technology and Applicationextremesfire15710% (1)
- UDSDocument20 pagesUDSjyothirmai100% (1)
- CANape Basics WhitePaper enDocument15 pagesCANape Basics WhitePaper enwlidhaaa0% (1)
- Vector Webinar AUTOSAR Testing 20111115 enDocument32 pagesVector Webinar AUTOSAR Testing 20111115 enHai Le100% (1)
- AUTomotive Open System ARchitecture A Complete Guide - 2020 EditionFrom EverandAUTomotive Open System ARchitecture A Complete Guide - 2020 EditionNo ratings yet
- Automotive Embedded Systems Complete Self-Assessment GuideFrom EverandAutomotive Embedded Systems Complete Self-Assessment GuideRating: 2 out of 5 stars2/5 (1)
- Factors Influencing Purchasing Intention of Smartphone Among University StudentsDocument9 pagesFactors Influencing Purchasing Intention of Smartphone Among University StudentsJai SharmaNo ratings yet
- Factors Affecting Consumers Buying IntenDocument26 pagesFactors Affecting Consumers Buying IntenSantoshNo ratings yet
- Chap08 3eDocument33 pagesChap08 3eSantoshNo ratings yet
- Radio Mirchi Marketing Strategy in BangaloreDocument6 pagesRadio Mirchi Marketing Strategy in BangaloreSantosh0% (1)
- SkewnessDocument13 pagesSkewnessRajesh Bansal100% (1)
- Micro-Hybrid Stop-Start Boosts Fuel SavingsDocument7 pagesMicro-Hybrid Stop-Start Boosts Fuel SavingsSantoshNo ratings yet
- 05b4 - E70 Adaptive Headlight SystemDocument28 pages05b4 - E70 Adaptive Headlight SystemAthira Sobhana Ramachandran100% (1)
- Miele Case Study Analyzes Marketing Resources and StrategyDocument7 pagesMiele Case Study Analyzes Marketing Resources and StrategySantosh0% (1)
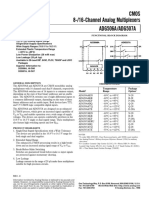
- Cmos 8-/16-Channel Analog Multiplexers: C To +85 C)Document8 pagesCmos 8-/16-Channel Analog Multiplexers: C To +85 C)SantoshNo ratings yet
- Self Healing HandbookDocument238 pagesSelf Healing Handbookhybridizeme100% (6)
- AP Unit8Document15 pagesAP Unit8Abhay Shankar BharadwajNo ratings yet
- Unit6 HVKDocument27 pagesUnit6 HVKSantoshNo ratings yet
- Linear Arrays: Relative PatternDocument8 pagesLinear Arrays: Relative Patternhdl_dcvNo ratings yet
- Unit1 KVijaya PDFDocument18 pagesUnit1 KVijaya PDFRammohan KakiNo ratings yet
- Slot Antennas Material PDFDocument8 pagesSlot Antennas Material PDFAjayaHSNo ratings yet
- International ConferenceDocument1 pageInternational ConferenceSantoshNo ratings yet
- Autosar NotesDocument25 pagesAutosar NotesSantoshNo ratings yet
- AutosarDocument170 pagesAutosarSantoshNo ratings yet
- Nature CureDocument195 pagesNature CureSantoshNo ratings yet
- OGG Support Type ObjectDocument4 pagesOGG Support Type Objectrdba2006No ratings yet
- Hard Method, Flashing With FastbootDocument6 pagesHard Method, Flashing With FastbootjoNo ratings yet
- Setup Guide for PWS5610 Programmable WorkstationDocument1 pageSetup Guide for PWS5610 Programmable WorkstationÁgó AttilaNo ratings yet
- PLC: Industrial Applications of Programmable Logic ControllerDocument5 pagesPLC: Industrial Applications of Programmable Logic ControllerJAYAKANTH ELUMALAINo ratings yet
- ELO SamplesDocument7 pagesELO SamplesexasperatingcapitalizationNo ratings yet
- Cyber Security - Lecture 11Document52 pagesCyber Security - Lecture 11Alan Jacob100% (3)
- WEB 1.oDocument4 pagesWEB 1.oMark Ronnel Zapanta BauzonNo ratings yet
- Sonicwall AnalyzerDocument201 pagesSonicwall AnalyzerDale DobeckNo ratings yet
- Procedure For Realdisp4Document5 pagesProcedure For Realdisp4ridhwan wahyudiNo ratings yet
- Program Classification (40Document52 pagesProgram Classification (40Haizmeer BonzieNo ratings yet
- Top 20 Questions On API TestingDocument6 pagesTop 20 Questions On API TestingAshuThakurNo ratings yet
- Daa QB PDFDocument12 pagesDaa QB PDFshri hariNo ratings yet
- Datasheet Xbee PRO s2bDocument3 pagesDatasheet Xbee PRO s2bEduuard Fraa DedrickNo ratings yet
- Set up FreeRADIUS for Active Directory authenticationDocument20 pagesSet up FreeRADIUS for Active Directory authenticationcpasgraveNo ratings yet
- Oracle Performance Tuning Basic PDFDocument50 pagesOracle Performance Tuning Basic PDFsharminaNo ratings yet
- GE-CT Unity - Best Practices - v3Document20 pagesGE-CT Unity - Best Practices - v3gabbu_No ratings yet
- C Program To Implement A Stack Using Linked List: Void Push Void Pop Void Display Int MainDocument4 pagesC Program To Implement A Stack Using Linked List: Void Push Void Pop Void Display Int MainSayan SenNo ratings yet
- Xcode Quick Start GuideDocument54 pagesXcode Quick Start GuideAdrian TudorNo ratings yet
- SAS GuideDocument3 pagesSAS GuidepsykohaxkNo ratings yet
- NS0 157Document42 pagesNS0 157Muthu LNo ratings yet
- Migration Monitor for Unicode Export and ImportDocument17 pagesMigration Monitor for Unicode Export and Importvisingh5050No ratings yet
- Assignment 10Document9 pagesAssignment 10marina duttaNo ratings yet
- Multivector&SIMD Computers Ch8Document12 pagesMultivector&SIMD Computers Ch8Charu DhingraNo ratings yet
- Receiver Function TutorialDocument6 pagesReceiver Function TutorialDeka Agung PratamaNo ratings yet
- Advanced Inotes Configurations:: Proxies / Plugins / TroubleshootingDocument50 pagesAdvanced Inotes Configurations:: Proxies / Plugins / Troubleshootingsanthosh pcNo ratings yet
- Chap2 CryptographyDocument29 pagesChap2 CryptographyHaslina MahmoodNo ratings yet
- As5506 - AADL - V1.6 03152008 Merged PHF PDFDocument342 pagesAs5506 - AADL - V1.6 03152008 Merged PHF PDFjuanblas86No ratings yet
- BEEKITFSDocument2 pagesBEEKITFSHarpreet SinghNo ratings yet
- Behavioral Modeling in Verilog: Digital Logic DesignDocument36 pagesBehavioral Modeling in Verilog: Digital Logic DesignAkshat Garg 18BEC0968No ratings yet
- Characteristics of Cyber CrimeDocument2 pagesCharacteristics of Cyber CrimeRizani Firdaus100% (1)