You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- LG4HKED-WE-VN53 - Engine Control System 4HK1Document404 pagesLG4HKED-WE-VN53 - Engine Control System 4HK1tuannholtt100% (8)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Cummins: Fault Code: 153 PID: P105 SPN: 105 FMI: 3 or 4Document5 pagesCummins: Fault Code: 153 PID: P105 SPN: 105 FMI: 3 or 4Enrrique LaraNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Daftar Isi: Power TrainDocument72 pagesDaftar Isi: Power Trainkuysrz100% (10)
- TAPPI TIP-0402-27 Continuous Dig Insp Rev 2005Document11 pagesTAPPI TIP-0402-27 Continuous Dig Insp Rev 2005a_parrat100% (2)
- Corner Cast in Place AnchorDocument7 pagesCorner Cast in Place Anchorwaweng22No ratings yet
- 3210Q011 04gb PDFDocument2 pages3210Q011 04gb PDFDenim102100% (1)
- FLECHA (Moment-Curvature Wall - Cali08)Document1 pageFLECHA (Moment-Curvature Wall - Cali08)Niranjan GodageNo ratings yet
- Group 1Document20 pagesGroup 1Niranjan GodageNo ratings yet
- AttachmentDocument3 pagesAttachmentNiranjan GodageNo ratings yet
- Consol Timetable S16-V3Document2 pagesConsol Timetable S16-V3Niranjan GodageNo ratings yet
- CPS Assignment 1: 1 InstructionsDocument3 pagesCPS Assignment 1: 1 InstructionsNiranjan GodageNo ratings yet
- 3 M (1) .Sc. I MathematicsDocument14 pages3 M (1) .Sc. I MathematicsNiranjan GodageNo ratings yet
- Final Brochure Q 11Document2 pagesFinal Brochure Q 11Niranjan GodageNo ratings yet
- 079254C 1g00u01 Iso CSW 1g00civ007 0001 - 0Document1 page079254C 1g00u01 Iso CSW 1g00civ007 0001 - 0Mahmoud HassanNo ratings yet
- Relativity QuestionsDocument4 pagesRelativity QuestionsChristoph KirchNo ratings yet
- Section 2 15 Hydrant PitDocument2 pagesSection 2 15 Hydrant PitCassy AbulenciaNo ratings yet
- Catalog284 004Document1 pageCatalog284 004Miltongrimi GrimilNo ratings yet
- Kinze 3700 ASDDocument284 pagesKinze 3700 ASDАндрей СмирновNo ratings yet
- M.E. - Heat Power RGPV Syllabus 2011Document5 pagesM.E. - Heat Power RGPV Syllabus 2011Arun MalviyaNo ratings yet
- Modern Bulk Storage Tanks Design & ManufacturingDocument2 pagesModern Bulk Storage Tanks Design & ManufacturingSCALE Ingeniería y ConstrucciónNo ratings yet
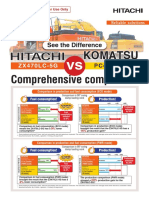
- ZX470-5G Vs Komatsu PC400-8Document3 pagesZX470-5G Vs Komatsu PC400-8Sohibul AminNo ratings yet
- RC SLAB1 SoftwareDocument14 pagesRC SLAB1 Softwaresofianina05No ratings yet
- Mechanical, Plumbing, Electrical Materials ListDocument3 pagesMechanical, Plumbing, Electrical Materials ListMohamedNo ratings yet
- Gear Group (Front) - Install - Idler Gear Only: Desmontagem e MontagemDocument6 pagesGear Group (Front) - Install - Idler Gear Only: Desmontagem e MontagemJose nildo lobato Mendes MendesNo ratings yet
- Archimedes and BuoyancyDocument2 pagesArchimedes and Buoyancyromaehab201912No ratings yet
- District Cooling: Efficiency Improvement in District Cooling System Using Direct CondensationDocument16 pagesDistrict Cooling: Efficiency Improvement in District Cooling System Using Direct CondensationIzah FriendsNo ratings yet
- HP Heaters Operation During Start Up of UnitDocument1 pageHP Heaters Operation During Start Up of UnitMuhammad luqman100% (1)
- ME Engine Shows Real Fuel Savings: DieselfactsDocument16 pagesME Engine Shows Real Fuel Savings: DieselfactsKamal WanniarachchiNo ratings yet
- Hybrid Vehicles: Definitions: System Tipical Sample RemarksDocument1 pageHybrid Vehicles: Definitions: System Tipical Sample RemarksLyan JonesNo ratings yet
- Chapter 2 P H Diagram Analysis Refrigerant Flow DiagiaramDocument20 pagesChapter 2 P H Diagram Analysis Refrigerant Flow DiagiaramMyo Kyaw KyawNo ratings yet
- DP09toc PDFDocument1 pageDP09toc PDFNerio CanadellNo ratings yet
- Pressure Testing ChecklistDocument3 pagesPressure Testing Checklistjerin100% (3)
- Spectroxepos Xep03: Verbrauchsmaterial Und Verschleißteile Consumables and Wear PartsDocument26 pagesSpectroxepos Xep03: Verbrauchsmaterial Und Verschleißteile Consumables and Wear Partsamin adimiNo ratings yet
- General Online QuestDocument80 pagesGeneral Online QuestPankaj PooniaNo ratings yet
- BOM for 11 kV VCB truck assembly componentsDocument3 pagesBOM for 11 kV VCB truck assembly componentsTawhidul IslamNo ratings yet
- Wagner Brake Supplemental Catalog 4-2-02Document72 pagesWagner Brake Supplemental Catalog 4-2-02Edinson Camba NucetteNo ratings yet