You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- WSCAD TrainingDocument226 pagesWSCAD TrainingVitalii VirchykNo ratings yet
- 2020 LeanIX WhitePaper - Definitive Guide To Business CapabilitiesDocument14 pages2020 LeanIX WhitePaper - Definitive Guide To Business CapabilitiesCarlosBritoVonBodenburgNo ratings yet
- IT Form 3 Class Notes Lesson Batch and Online ProcessingDocument45 pagesIT Form 3 Class Notes Lesson Batch and Online ProcessingKerwin AlexanderNo ratings yet
- Aqua Security Ebook Container Security-10 Things DevOps Need To DoDocument12 pagesAqua Security Ebook Container Security-10 Things DevOps Need To DoJulio Cesar Juan LuisNo ratings yet
- Ingersoll Rand Parts ListDocument42 pagesIngersoll Rand Parts ListIzabela SantanaNo ratings yet
- Downtime and PM Order Integration With SAP PPDS - SAP BlogsDocument9 pagesDowntime and PM Order Integration With SAP PPDS - SAP BlogsVigneshNo ratings yet
- Bootloader Design Considerations 90003207ADocument12 pagesBootloader Design Considerations 90003207Akeyboard2014No ratings yet
- EK-RA6M4 - Evaluation Kit For RA6M4 MCU Group - RenesasDocument6 pagesEK-RA6M4 - Evaluation Kit For RA6M4 MCU Group - Renesaskeyboard2014No ratings yet
- An Easy Way To Build A Tree in JavaScript Using Object References - TypeOfNaNDocument6 pagesAn Easy Way To Build A Tree in JavaScript Using Object References - TypeOfNaNkeyboard2014No ratings yet
- Concurrency Freaks - Interrupt Handler in C11 With AtomicsDocument4 pagesConcurrency Freaks - Interrupt Handler in C11 With Atomicskeyboard2014No ratings yet
- Start Here NXP MFS 1.5.1.1 PDFDocument24 pagesStart Here NXP MFS 1.5.1.1 PDFkeyboard2014No ratings yet
- US4903192 PID Fuzzy LogicDocument25 pagesUS4903192 PID Fuzzy Logickeyboard2014No ratings yet
- BSP Porting Guide L3.0.35 1.1.0Document63 pagesBSP Porting Guide L3.0.35 1.1.0keyboard2014No ratings yet
- Ces 2017Document32 pagesCes 2017keyboard2014No ratings yet
- Running Rotary Flexible Link ExperimentDocument4 pagesRunning Rotary Flexible Link Experimentkeyboard2014No ratings yet
- Release NoteDocument28 pagesRelease Notekeyboard2014No ratings yet
- Tutorial EZ430-RF2500Document112 pagesTutorial EZ430-RF2500Paulo L. MuñozNo ratings yet
- Tutorialv0 4Document11 pagesTutorialv0 4keyboard2014No ratings yet
- Nonlinear System Identification of Rapid Thermal ProcessingDocument7 pagesNonlinear System Identification of Rapid Thermal Processingkeyboard2014No ratings yet
- Timers 1Document22 pagesTimers 1keyboard2014No ratings yet
- D3 PrefsDocument1 pageD3 PrefsfreebookmanNo ratings yet
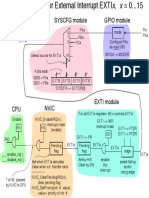
- Configuring External Interrupts using the SYSCFG and EXTI ModulesDocument1 pageConfiguring External Interrupts using the SYSCFG and EXTI Moduleskeyboard2014No ratings yet
- SML Fa01Document2 pagesSML Fa01keyboard2014No ratings yet
- Homotopy Perturbation Based Linearization of Nonlinear Heat Transfer Dynamic PDFDocument14 pagesHomotopy Perturbation Based Linearization of Nonlinear Heat Transfer Dynamic PDFkeyboard2014No ratings yet
- Pt100 Transmitter MicrochipDocument8 pagesPt100 Transmitter Microchipem01803257No ratings yet
- 066 DOWNLOAD Using Two General Purpose Timers Lab ManualDocument8 pages066 DOWNLOAD Using Two General Purpose Timers Lab Manualkeyboard2014No ratings yet
- 042 DOWNLOAD P1.1 Push Button Lab ManualDocument29 pages042 DOWNLOAD P1.1 Push Button Lab Manualkeyboard2014No ratings yet
- AMATYC2003 FallDocument2 pagesAMATYC2003 FallleonutdoughNo ratings yet
- SML Fa01Document2 pagesSML Fa01keyboard2014No ratings yet
- AN4345Document12 pagesAN4345keyboard2014No ratings yet
- AMATYC Student Math League Test #1Document3 pagesAMATYC Student Math League Test #1keyboard2014No ratings yet
- AMATYC Student Msthematics League: I + Atcsec: + Arccot: + Arccot I ? 4 4 4 5 21Document3 pagesAMATYC Student Msthematics League: I + Atcsec: + Arccot: + Arccot I ? 4 4 4 5 21keyboard2014No ratings yet
- SML Fa05Document3 pagesSML Fa05keyboard2014No ratings yet
- ECP Lab2 First Order r6Document5 pagesECP Lab2 First Order r6keyboard2014No ratings yet
- AN3905Document24 pagesAN3905keyboard2014No ratings yet
- ECP Lab1 Simulink Intro r4Document6 pagesECP Lab1 Simulink Intro r4keyboard2014No ratings yet
- Print Ict 2 Reviewer Last TopicDocument3 pagesPrint Ict 2 Reviewer Last Topicinquiries.francisNo ratings yet
- Metal Gas Cabinets Metal Gas Cabinets: (With Back Wall)Document1 pageMetal Gas Cabinets Metal Gas Cabinets: (With Back Wall)Cak NhassNo ratings yet
- Manual de ServicioDocument192 pagesManual de ServicioCrispin CrispianoNo ratings yet
- Data Science, ML and AI: Overview and ApplicationsDocument13 pagesData Science, ML and AI: Overview and ApplicationsJiren GrayNo ratings yet
- Obj 1997paper 2Document15 pagesObj 1997paper 2Uday KakkarNo ratings yet
- Atif CV (Architect) PKDocument2 pagesAtif CV (Architect) PKFahad0% (1)
- Quartusii Handbook PDFDocument1,681 pagesQuartusii Handbook PDFEnrique LopezNo ratings yet
- Atitudine LSM9DS0 SensorDocument74 pagesAtitudine LSM9DS0 SensorquebornNo ratings yet
- Measuring Quality Data and Statistical Process Control ChartsDocument5 pagesMeasuring Quality Data and Statistical Process Control ChartsIskandar Ibrahim100% (1)
- Load Sensing Rev.A 04.2006.Document80 pagesLoad Sensing Rev.A 04.2006.Aldo CarvajalNo ratings yet
- Simple JSON REST Consumption With GSON API - CodeProjectDocument4 pagesSimple JSON REST Consumption With GSON API - CodeProjectgfgomesNo ratings yet
- SM4378NSKP: Pin Description FeaturesDocument11 pagesSM4378NSKP: Pin Description FeaturesChami NdaNo ratings yet
- LG DVD DS9313CPM (3829RHP038B)Document48 pagesLG DVD DS9313CPM (3829RHP038B)videosonNo ratings yet
- 16 - Incident Response, Disaster Recovery & Business Continuity Section PDFDocument10 pages16 - Incident Response, Disaster Recovery & Business Continuity Section PDFnallamalli subramanyamNo ratings yet
- AVH-P5000DVD: Connecting The Units EnglishDocument8 pagesAVH-P5000DVD: Connecting The Units EnglishLuiz FigueiredoNo ratings yet
- Scholarship Management System: Team Members: BM10518, BM10527, BM10545 Class: II-MCADocument30 pagesScholarship Management System: Team Members: BM10518, BM10527, BM10545 Class: II-MCAJoe Nishanth100% (3)
- IHM Board ControlsDocument1 pageIHM Board ControlsjoseNo ratings yet
- OpendTect Administrators ManualDocument112 pagesOpendTect Administrators ManualKarla SantosNo ratings yet
- IT518 - Game Design and Development Syllabus With Learning OutcomesDocument4 pagesIT518 - Game Design and Development Syllabus With Learning OutcomesJagan LankaNo ratings yet
- Printing in vDos to Windows printersDocument3 pagesPrinting in vDos to Windows printersElSuperbeastoNo ratings yet
- 04 Handout 1 (Feedback)Document11 pages04 Handout 1 (Feedback)Kathleen Anne MendozaNo ratings yet
- Uppen 12000 Power Amplifier SpecificationDocument2 pagesUppen 12000 Power Amplifier SpecificationAlexandra SanduNo ratings yet
- Omen by HP Laptop 15-ce072TX QuickspecsDocument2 pagesOmen by HP Laptop 15-ce072TX QuickspecsVijayNo ratings yet
- Emko CatalogueDocument60 pagesEmko Cataloguelãng duNo ratings yet