You might also like
- Unit-5 SMDocument27 pagesUnit-5 SMShaik ShaheenaNo ratings yet
- Synchronous Motors ExplainedDocument16 pagesSynchronous Motors ExplainedAashrith GangamNo ratings yet
- Unit 5 FinalDocument10 pagesUnit 5 FinaljayababNo ratings yet
- mywbut.com Synchronous Motor ChapterDocument16 pagesmywbut.com Synchronous Motor ChaptersnghvishalNo ratings yet
- 21EE44-Module 5Document23 pages21EE44-Module 5AshwiniNo ratings yet
- Fig Showing Picture of ADocument6 pagesFig Showing Picture of ADemeico DavisNo ratings yet
- Constructional Difference: Synchronous MotorDocument5 pagesConstructional Difference: Synchronous Motormirza121No ratings yet
- Electric MachinesDocument27 pagesElectric Machinespuneethbj66No ratings yet
- Induction Motor Discussion of TheoryDocument5 pagesInduction Motor Discussion of TheoryRadtech SboNo ratings yet
- Module V Synchronous MotorsDocument21 pagesModule V Synchronous Motorsyanith kumarNo ratings yet
- Methods of Starting of Synchronous Motor - BravoDocument4 pagesMethods of Starting of Synchronous Motor - Bravocrresoso957100% (2)
- Unit 4 Synchronous MotorsDocument22 pagesUnit 4 Synchronous MotorsPalak JioNo ratings yet
- The Actual Difference Between Synchronous and Induction MotorsDocument57 pagesThe Actual Difference Between Synchronous and Induction MotorsJoseph B Delos ReyesNo ratings yet
- Synchronous Motor BasicsDocument9 pagesSynchronous Motor BasicsOmed OthmanNo ratings yet
- Topic 1Document20 pagesTopic 1Ʋiŋêet ḠåuṯḁmNo ratings yet
- Unit-4 Induction MotorsDocument26 pagesUnit-4 Induction MotorsAnurag Singhal0% (1)
- 3.18 Ac MotorsDocument25 pages3.18 Ac Motorsdeleted Yt acc.No ratings yet
- AC Synchronous GeneratorDocument8 pagesAC Synchronous Generatoraswardi8756No ratings yet
- Auto Synchronous MotorDocument3 pagesAuto Synchronous Motorojunga.samuel21No ratings yet
- Synchronous Motor Working Principle and Starting MethodsDocument21 pagesSynchronous Motor Working Principle and Starting MethodsPrasad YadavNo ratings yet
- Three Phase Induction Motor FundamentalsDocument3 pagesThree Phase Induction Motor FundamentalsDhanashree ParanjapeNo ratings yet
- Single Phase Induction MotorsDocument18 pagesSingle Phase Induction MotorsAMIE Study Circle, RoorkeeNo ratings yet
- Motors and LoadsDocument24 pagesMotors and Loadsmanukjoy007No ratings yet
- Induction Motor: From Wikipedia, The Free EncyclopediaDocument7 pagesInduction Motor: From Wikipedia, The Free Encyclopediaadhikari_pradeepNo ratings yet
- Module 4 4Document6 pagesModule 4 4Atharva KhadseNo ratings yet
- Three Phase Induction MotorDocument21 pagesThree Phase Induction MotorPrianshu JyosyulaNo ratings yet
- History: AC Motor Electromagnetic Induction Slip Rings Commutators Slip-Ring AC Motors Polyphase FrictionDocument8 pagesHistory: AC Motor Electromagnetic Induction Slip Rings Commutators Slip-Ring AC Motors Polyphase FrictionegyptonNo ratings yet
- Chapter 04 Polyphase Synchronous MotorDocument19 pagesChapter 04 Polyphase Synchronous MotorAbdullrahman Al-ShammaaNo ratings yet
- Understanding Induction MotorsDocument23 pagesUnderstanding Induction Motorssai netNo ratings yet
- Step by Step Development of Equivalent Circuit of Induction MotorDocument11 pagesStep by Step Development of Equivalent Circuit of Induction MotornandhakumarmeNo ratings yet
- Induction Motors Unit 3Document26 pagesInduction Motors Unit 3babu KaroliNo ratings yet
- Induction Motor: Citations VerificationDocument11 pagesInduction Motor: Citations VerificationChamika Dilshan WickramawardenaNo ratings yet
- Induction MotorDocument14 pagesInduction Motorhamba0007No ratings yet
- Electrical Machines: Unit-4Document53 pagesElectrical Machines: Unit-4MineCraft B-Tech CSNo ratings yet
- Understanding Induction MotorsDocument28 pagesUnderstanding Induction MotorsKimsairng CheaNo ratings yet
- Single Phase Induction Motor Starting MethodsDocument16 pagesSingle Phase Induction Motor Starting MethodsNaresh GollapalliNo ratings yet
- Induction Motor: Navigation SearchDocument8 pagesInduction Motor: Navigation SearchSoni Mishra TiwariNo ratings yet
- Single Phase Induction MotorDocument22 pagesSingle Phase Induction MotorMubashshir AminNo ratings yet
- Unit III Synchronous Machines GuideDocument16 pagesUnit III Synchronous Machines GuideDhanush BhaiNo ratings yet
- Electrical Machines Final AssignmentDocument13 pagesElectrical Machines Final Assignmentaamir.faiazNo ratings yet
- Basic Principles of Synchronous Motor OperationDocument16 pagesBasic Principles of Synchronous Motor OperationJesse Jones SeraspeNo ratings yet
- Synchronous AC Motor GuideDocument7 pagesSynchronous AC Motor Guidecedro08No ratings yet
- Three Phase Induction MotorsDocument22 pagesThree Phase Induction MotorsSabiha MahbubNo ratings yet
- Induction Motor - Wikipedia, The Free EncyclopediaDocument11 pagesInduction Motor - Wikipedia, The Free Encyclopediaak_thimiriNo ratings yet
- Induction Motor: This Article Does NotDocument24 pagesInduction Motor: This Article Does Notyashraj786100% (1)
- Induction Motor Basics - How They WorkDocument8 pagesInduction Motor Basics - How They WorkNaveen KumarNo ratings yet
- Ac MotorsDocument28 pagesAc MotorsShilpa SweetyNo ratings yet
- Induction Motor CharacteristicsDocument14 pagesInduction Motor CharacteristicsAnnaRajNo ratings yet
- Ac Motors: (A) Synchronous Motors. (B) Asynchronous MotorsDocument18 pagesAc Motors: (A) Synchronous Motors. (B) Asynchronous MotorsStudy portalNo ratings yet
- Free-Samples Amie Chapters Single Phase Induction MotorsDocument19 pagesFree-Samples Amie Chapters Single Phase Induction MotorsStitch BeatzNo ratings yet
- Starting of Syn MotorDocument4 pagesStarting of Syn MotorChota BheemNo ratings yet
- Bee052 Electrical Machine Modeling and AnalysisDocument28 pagesBee052 Electrical Machine Modeling and Analysissunny g.100% (1)
- A New System of Alternating Current Motors and Transformers and Other EssaysFrom EverandA New System of Alternating Current Motors and Transformers and Other EssaysRating: 5 out of 5 stars5/5 (1)
- A New System of Alternating Current Motors and TransformersFrom EverandA New System of Alternating Current Motors and TransformersRating: 1 out of 5 stars1/5 (1)
- Electrical Machines: Lecture Notes for Electrical Machines CourseFrom EverandElectrical Machines: Lecture Notes for Electrical Machines CourseNo ratings yet
- Home-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsFrom EverandHome-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsNo ratings yet
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- 1000 Vocabulary Words From The HINDUDocument64 pages1000 Vocabulary Words From The HINDUAnil RatheeNo ratings yet
- Value Based QuestionsDocument1 pageValue Based QuestionsVinay PrakashNo ratings yet
- Arson:: Misdemeanor: A Minor Wrong Doing Testify: Touchstone: ProsecutionDocument5 pagesArson:: Misdemeanor: A Minor Wrong Doing Testify: Touchstone: ProsecutionVinay PrakashNo ratings yet
- Electrochemistry Value Based QuestionsDocument1 pageElectrochemistry Value Based QuestionsVinay PrakashNo ratings yet
- 12 Mathematics Impq Relations and Functions 01Document8 pages12 Mathematics Impq Relations and Functions 01Antoreep JanaNo ratings yet
- Value Based QuestionsDocument1 pageValue Based QuestionsVinay PrakashNo ratings yet
- Value Bases Questions From P-Block ,: Complied by Vijesh Kumar (PGT Chemistry, KV Leh)Document2 pagesValue Bases Questions From P-Block ,: Complied by Vijesh Kumar (PGT Chemistry, KV Leh)Vinay PrakashNo ratings yet
- EligibilityDocument7 pagesEligibilityanilperfectNo ratings yet
- Measure wavelengths of emission spectra using diffraction grating spectrometerDocument7 pagesMeasure wavelengths of emission spectra using diffraction grating spectrometerVinay PrakashNo ratings yet
- IBC Voluntary Liquidation ProcessDocument21 pagesIBC Voluntary Liquidation ProcessVinay PrakashNo ratings yet
- Weekly General Knowledge Banking and Finance Capsule 27th May To 2nd June 2018Document5 pagesWeekly General Knowledge Banking and Finance Capsule 27th May To 2nd June 2018Vinay PrakashNo ratings yet
- Diffraction Grating1 PDFDocument3 pagesDiffraction Grating1 PDFIrfanNo ratings yet
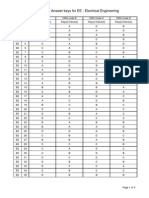
- Keys For EE 2013Document2 pagesKeys For EE 2013dhayalasundaram5689No ratings yet
- CBSE Class 10 Social Science Notes on DevelopmentDocument2 pagesCBSE Class 10 Social Science Notes on DevelopmentAdhrit SureshNo ratings yet
- Electrical EngineeringDocument2 pagesElectrical EngineeringSantosh SandyNo ratings yet
- L3 OperatorsDocument28 pagesL3 OperatorsVinay PrakashNo ratings yet
- Common SuffixesDocument2 pagesCommon Suffixesquin1781No ratings yet
- Moment of Inertia (Graphics)Document32 pagesMoment of Inertia (Graphics)NanowordNo ratings yet
- Final PEL Week 2 Lect 3 Tenses NewwDocument34 pagesFinal PEL Week 2 Lect 3 Tenses NewwVinay PrakashNo ratings yet
- Reference List of Synonyms PDFDocument18 pagesReference List of Synonyms PDFpiyush13juNo ratings yet
- Organic Compounds Containg NitrogenDocument2 pagesOrganic Compounds Containg NitrogenVinay PrakashNo ratings yet
- UNIT - IV Arithmetical ReasoningDocument41 pagesUNIT - IV Arithmetical ReasoningVinay PrakashNo ratings yet
- L11 ArrayListDocument13 pagesL11 ArrayListVinay PrakashNo ratings yet
- Biomolecules Value Based QuestionsDocument2 pagesBiomolecules Value Based QuestionsVinay PrakashNo ratings yet
- Modern Programming Tools and Techniques-I: Lovely Professional University, PunjabDocument28 pagesModern Programming Tools and Techniques-I: Lovely Professional University, Punjabkethu2403No ratings yet
- Modern Programming Tools and Techniques-I: Lecture 8: InheritanceDocument27 pagesModern Programming Tools and Techniques-I: Lecture 8: InheritanceKoushik ReddieNo ratings yet
- Internal Details of JavaDocument4 pagesInternal Details of JavaVinay PrakashNo ratings yet
- UNIT - I Alphabet TestDocument24 pagesUNIT - I Alphabet TestVinay PrakashNo ratings yet
- Pel101-Communication Skills-I: Lecture-10 WEEK-5 Designed by Ruchika Verma, 13422Document43 pagesPel101-Communication Skills-I: Lecture-10 WEEK-5 Designed by Ruchika Verma, 13422Vinay PrakashNo ratings yet
- Logical Reasoning: Understanding SyllogismsDocument52 pagesLogical Reasoning: Understanding SyllogismsVinay PrakashNo ratings yet
- Welder Qualification CertificateDocument2 pagesWelder Qualification CertificateLuttpi100% (1)
- UT Book ArticlesDocument135 pagesUT Book ArticlesAnonymous uXdS9Y7100% (1)
- Gamma DistributionDocument8 pagesGamma DistributionVarun MunjalNo ratings yet
- Greenwich Apparent Sidereal Time: Function Gast1Document3 pagesGreenwich Apparent Sidereal Time: Function Gast1GERMANCRICKETNo ratings yet
- Infinity Other Solar Systems: TrinityDocument1 pageInfinity Other Solar Systems: TrinityP Eng Suraj SinghNo ratings yet
- Aplicações Corantes Naturais - ReviewDocument22 pagesAplicações Corantes Naturais - ReviewIlídiaFerreiraNo ratings yet
- Fundamentals of Electrical EngineeringDocument96 pagesFundamentals of Electrical EngineeringfrankieyiiNo ratings yet
- Learning Content: First Law of ThermodynamicsDocument7 pagesLearning Content: First Law of ThermodynamicsHENRICK IGLENo ratings yet
- HW5 Work and EnergyDocument20 pagesHW5 Work and EnergyGina G. HarrisNo ratings yet
- Davis Langdon Cost Models: Office RefurbishmentDocument14 pagesDavis Langdon Cost Models: Office RefurbishmentcsharpplusNo ratings yet
- Principle of Maximum EntropyDocument10 pagesPrinciple of Maximum Entropydev414No ratings yet
- AssignmentDocument3 pagesAssignmentPrakhar0112No ratings yet
- Psychrometric Charts (Humidity Chart)Document7 pagesPsychrometric Charts (Humidity Chart)ccami709No ratings yet
- Fundamentals of Linear Control (PDFDrive)Document401 pagesFundamentals of Linear Control (PDFDrive)hajibaNo ratings yet
- Leh Climate Guide: How to Design for Cold & Dry ConditionsDocument24 pagesLeh Climate Guide: How to Design for Cold & Dry ConditionsYashlokDutt100% (1)
- IJIRAE::An Overviewof Analysis, Measurement and Modelling of Dynamics Properties of Composite Materials Using Oberst Beam MethodDocument4 pagesIJIRAE::An Overviewof Analysis, Measurement and Modelling of Dynamics Properties of Composite Materials Using Oberst Beam MethodIJIRAE- International Journal of Innovative Research in Advanced EngineeringNo ratings yet
- 10th Class Smarts NotesDocument550 pages10th Class Smarts NotesMazhar HassnainNo ratings yet
- 66kv Earthing System R-1 (For Print Out)Document8 pages66kv Earthing System R-1 (For Print Out)g_nraja100% (1)
- Chapter 3 Wafer Fabrication - IDocument22 pagesChapter 3 Wafer Fabrication - Ivishvajeet dhawaleNo ratings yet
- Setting I T Protection For Direct PWM Commutated MotorsDocument2 pagesSetting I T Protection For Direct PWM Commutated Motorsalpha1ahNo ratings yet
- Abstracts of National PhD Students Days 2018 (NPSD'2018Document18 pagesAbstracts of National PhD Students Days 2018 (NPSD'2018Lidia100% (1)
- Performance Evaluation of Ground Based Radar SystemsDocument122 pagesPerformance Evaluation of Ground Based Radar SystemsAbrar HafizNo ratings yet
- Resume For FaisalDocument3 pagesResume For FaisalFaisal Zeineddine100% (1)
- Ac GeneratorDocument2 pagesAc Generatoryashwanth.s10aNo ratings yet
- CmpE Degree RequirementsDocument3 pagesCmpE Degree RequirementsTrai TranNo ratings yet
- 2008-Teacher 20080324 1509 2Document20 pages2008-Teacher 20080324 1509 2Mateo PremarionNo ratings yet
- B.E. Degree Exam EC141 Electronic DevicesDocument3 pagesB.E. Degree Exam EC141 Electronic DevicesKarthik JiiNo ratings yet
- LW Cosmic RaysDocument15 pagesLW Cosmic Rayskoochimetal100% (3)
- Journal of Qafqaz University No - 25Document160 pagesJournal of Qafqaz University No - 25ramil2009No ratings yet
- Chapter 2-Traction System PDFDocument53 pagesChapter 2-Traction System PDFSwati kNo ratings yet