You might also like
- Lesson 1Document6 pagesLesson 1Justine James NuylesNo ratings yet
- Electric Motor Control: DC, AC, and BLDC MotorsFrom EverandElectric Motor Control: DC, AC, and BLDC MotorsRating: 4.5 out of 5 stars4.5/5 (19)
- Elec-107-Module-1Document23 pagesElec-107-Module-1Kylle Bryan AranceNo ratings yet
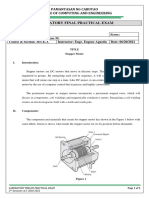
- Laboratory Final Practical Exam: Pamantasan NG Cabuyao College of Computing and EngineeringDocument3 pagesLaboratory Final Practical Exam: Pamantasan NG Cabuyao College of Computing and EngineeringKrizalene ResurreccionNo ratings yet
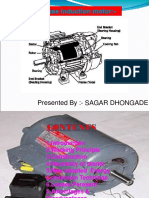
- Starter Motor Operation & PartsDocument15 pagesStarter Motor Operation & PartsFeras Al-AzzehNo ratings yet
- Final - Electronics10 - q4 - Mod3 - Principle Operation of A Robotic Motor 1 - May 8 122023Document22 pagesFinal - Electronics10 - q4 - Mod3 - Principle Operation of A Robotic Motor 1 - May 8 122023Sharina SilvaNo ratings yet
- Generating Electricity From A Bicycle DynamoDocument6 pagesGenerating Electricity From A Bicycle Dynamosuharto_pppptkipaNo ratings yet
- Eee-233 R1Document14 pagesEee-233 R1ArifNo ratings yet
- Induction Motor: Working Principle, TypesDocument3 pagesInduction Motor: Working Principle, TypesFARAZ UL ISLAMNo ratings yet
- Course E-3023 Written - Pole Motors: 5870 Highway 6 North, Suite 310 Houston, TX 77084 Toll Free: 877 500-7145Document31 pagesCourse E-3023 Written - Pole Motors: 5870 Highway 6 North, Suite 310 Houston, TX 77084 Toll Free: 877 500-7145casualguy_0052194No ratings yet
- AC Machines Lab. Experiment No.1: University Electronics Engineering College Systems and Control DepDocument5 pagesAC Machines Lab. Experiment No.1: University Electronics Engineering College Systems and Control DepQusai JamalNo ratings yet
- Skip To ContentDocument17 pagesSkip To Contentkidanemariam teseraNo ratings yet
- EEE363 (Exp 7) Study of The Starting Characteristics and Torque Speed Relationship of Three Phase Synchronous MotorDocument6 pagesEEE363 (Exp 7) Study of The Starting Characteristics and Torque Speed Relationship of Three Phase Synchronous Motorsalad.ass420420No ratings yet
- Dewatering Pump Installation and CommissioningDocument22 pagesDewatering Pump Installation and CommissioningOdejobi Oluseyi JonathanNo ratings yet
- Speed Control of Induction Motor Using AnnDocument67 pagesSpeed Control of Induction Motor Using AnnBnr Goud50% (6)
- Induction Motor ReportDocument13 pagesInduction Motor ReportShivani SinghNo ratings yet
- Reaction PaperDocument6 pagesReaction PaperAngelo Escoro Dante100% (1)
- Electrical Drives Guide for RoboticsDocument14 pagesElectrical Drives Guide for RoboticsAbhijith JoseNo ratings yet
- Single Phase Induction MotorsDocument11 pagesSingle Phase Induction MotorsSafnas KariapperNo ratings yet
- Induction MotorDocument2 pagesInduction MotorStephen CooperNo ratings yet
- Unit VDocument7 pagesUnit VMonte CarloNo ratings yet
- Learning Electric Motor and It's ComponentDocument4 pagesLearning Electric Motor and It's Componentandrey tinoh100% (1)
- Single Phase Induction Motor and Stepper MotorDocument11 pagesSingle Phase Induction Motor and Stepper MotorManthan deshmukhNo ratings yet
- All Parts of Starter Motor and FunctionDocument4 pagesAll Parts of Starter Motor and FunctionBeverly Sotomayor CrisologoNo ratings yet
- Multipurpose Machines Using Scotch Yoke MechanismDocument36 pagesMultipurpose Machines Using Scotch Yoke Mechanismnithinkenator88% (16)
- Question Bank: AT6502 Automotive Electrical & ElectronicsDocument7 pagesQuestion Bank: AT6502 Automotive Electrical & ElectronicsLovely BhuvaneshNo ratings yet
- CSPDocument8 pagesCSPmeghraj01100% (1)
- New Microsoft Word DocumentDocument5 pagesNew Microsoft Word DocumentraviNo ratings yet
- Single Phase Induction MotorDocument5 pagesSingle Phase Induction MotorSridhar SridharNo ratings yet
- Module 5 ElectricalDocument22 pagesModule 5 ElectricalSKANDAN BHARADWAJNo ratings yet
- Lab Rep DraftDocument5 pagesLab Rep DraftKent Orriele FadriquelNo ratings yet
- Electrical Interview Questions & Answers - Lab Viva QuestionsDocument2 pagesElectrical Interview Questions & Answers - Lab Viva QuestionsLaxman Naidu NNo ratings yet
- Full Updated Electrical Machines 2 New Module - 2018Document61 pagesFull Updated Electrical Machines 2 New Module - 2018Didar MiaNo ratings yet
- AC Machine Course OutcomesDocument19 pagesAC Machine Course OutcomesFred RotichNo ratings yet
- Induction Motor CharacteristicsDocument14 pagesInduction Motor CharacteristicsAnnaRajNo ratings yet
- Protection SystemsDocument13 pagesProtection SystemsVasudevan MuruganandamNo ratings yet
- Mechatronics Ktu Module 6Document36 pagesMechatronics Ktu Module 6Adarsh s nairNo ratings yet
- Motor Fundamentals PDFDocument12 pagesMotor Fundamentals PDFrajeshpalla4uNo ratings yet
- Lamaran NongyiDocument12 pagesLamaran NongyiTonoTonyNo ratings yet
- Scotch Yoke MechanismDocument37 pagesScotch Yoke MechanismSaravanan Viswakarma100% (1)
- Bearing - Used To Enable Rotational or Linear Movement, While Reducing Friction and Handling StressDocument2 pagesBearing - Used To Enable Rotational or Linear Movement, While Reducing Friction and Handling StressAmyiel FloresNo ratings yet
- Single PhasingDocument22 pagesSingle PhasingAakarsh Rastogi100% (2)
- A.C. Motor and Its TypesDocument10 pagesA.C. Motor and Its TypessasidaranNo ratings yet
- Stepper Motors With ArduinoDocument19 pagesStepper Motors With Arduinochafic WEISSNo ratings yet
- AC Motor Types and Working PrinciplesDocument10 pagesAC Motor Types and Working Principlesandi yusufNo ratings yet
- Unit 4Document23 pagesUnit 4Ayush SrivastavaNo ratings yet
- Ac Motors: (A) Synchronous Motors. (B) Asynchronous MotorsDocument18 pagesAc Motors: (A) Synchronous Motors. (B) Asynchronous MotorsStudy portalNo ratings yet
- Solar Grass Cutter MechanismDocument38 pagesSolar Grass Cutter MechanismAakash DindigulNo ratings yet
- Fundamentals OF Polyphase Electric MotorsDocument12 pagesFundamentals OF Polyphase Electric Motors1960maocNo ratings yet
- Group 2 Ac Motors Technical ReportDocument12 pagesGroup 2 Ac Motors Technical Reporttristan jeff bautistaNo ratings yet
- SeminarDocument24 pagesSeminarAkshay GatkalNo ratings yet
- AC Motor, Servo Motor and Stepper MotorDocument12 pagesAC Motor, Servo Motor and Stepper MotorAhmedSayedNo ratings yet
- ac motorDocument44 pagesac motorAbra AbraNo ratings yet
- Electric MotorsDocument10 pagesElectric Motorsmgongo88No ratings yet
- Advantages and Disadvantages of Single Phase MotorsDocument10 pagesAdvantages and Disadvantages of Single Phase Motorsim always awesome100% (1)
- Induction Motor: Stator ConstructionDocument9 pagesInduction Motor: Stator ConstructionMohamed IbrahemNo ratings yet
- EE 306 - Electrical Engineering LaboratoryDocument10 pagesEE 306 - Electrical Engineering LaboratoryMohammed KhouliNo ratings yet
- Types of Single Phase Induction Motors GuideDocument13 pagesTypes of Single Phase Induction Motors GuidewazidulNo ratings yet
- Continue: Starter Motor Parts and Functions PDFDocument2 pagesContinue: Starter Motor Parts and Functions PDFronald allan liviocoNo ratings yet
- Transmission of Power Through BeltsDocument29 pagesTransmission of Power Through BeltsIshmael KhanNo ratings yet
- Transmission of Power Through BeltsDocument29 pagesTransmission of Power Through BeltsIshmael KhanNo ratings yet
- Orientation 2021Document1 pageOrientation 2021Ishmael KhanNo ratings yet
- 1st SEMESTER ORIENTATION CERMONEY 2021Document1 page1st SEMESTER ORIENTATION CERMONEY 2021Ishmael KhanNo ratings yet
- Friction - Factors Affecting FrictionDocument2 pagesFriction - Factors Affecting FrictionIshmael KhanNo ratings yet
- Graph B/W Effort and Load AppliedDocument3 pagesGraph B/W Effort and Load AppliedIshmael KhanNo ratings yet
- Why Does Friction Not Depend Upon Area of Contact - QuoraDocument6 pagesWhy Does Friction Not Depend Upon Area of Contact - QuoraIshmael KhanNo ratings yet
- ConstitutionDocument294 pagesConstitutionIshmael KhanNo ratings yet
- G and M CodesDocument4 pagesG and M CodesIshmael KhanNo ratings yet
- Experiment # 04 To Calculate Reaction Forces in A Simply Supported BeamDocument2 pagesExperiment # 04 To Calculate Reaction Forces in A Simply Supported BeamIshmael KhanNo ratings yet
- Boundaries and Regions: Autocad 2D TutorialDocument3 pagesBoundaries and Regions: Autocad 2D TutorialIshmael KhanNo ratings yet
- Chapter 3Document9 pagesChapter 3Mushtaq M.ChinoyNo ratings yet
- Chapter13 More Edit CommandsDocument13 pagesChapter13 More Edit Commandsamini307100% (1)
- Iq 2000Document120 pagesIq 2000OskarNo ratings yet
- 3 MosfetDocument16 pages3 MosfetPok NuttapolNo ratings yet
- 654112-El-Cal-0001 Electrical Load Calculation PDFDocument1 page654112-El-Cal-0001 Electrical Load Calculation PDFjavier gutierrez pizaNo ratings yet
- Scanter 240100 TERMA Surface Movement Radar System Specification PDFDocument30 pagesScanter 240100 TERMA Surface Movement Radar System Specification PDFanteysNo ratings yet
- Solcon USA HRVS DN MV 10 13pt8kV Spec Guide 2011Document10 pagesSolcon USA HRVS DN MV 10 13pt8kV Spec Guide 2011harmlesdragonNo ratings yet
- Instructions Alptec 3.2 5.2Document16 pagesInstructions Alptec 3.2 5.2Cris_eu09No ratings yet
- Risk Assessment Report - Skka TempleDocument20 pagesRisk Assessment Report - Skka TempleYazhisai SelviNo ratings yet
- Viva Question Bank FOCDocument8 pagesViva Question Bank FOCashish sharmaNo ratings yet
- Abhi Baby Cry DetectorDocument22 pagesAbhi Baby Cry DetectorÃbhilâśh RêddÿNo ratings yet
- MRCET UG Model Question Papers on Electric & Hybrid VehiclesDocument8 pagesMRCET UG Model Question Papers on Electric & Hybrid VehiclesDilip KumarNo ratings yet
- Analog Circuits II Lab ManualDocument47 pagesAnalog Circuits II Lab ManualParesh SawantNo ratings yet
- Micom p211 Io 01 enDocument8 pagesMicom p211 Io 01 enKopi143No ratings yet
- 8series Type Test Report Safety Insulation Resistance Test EN/IEC60255-5: 2000Document7 pages8series Type Test Report Safety Insulation Resistance Test EN/IEC60255-5: 2000andrez880103No ratings yet
- SAT Subject Test - PhysicsDocument2 pagesSAT Subject Test - PhysicsBosserz ThanawitNo ratings yet
- Sample Adam Entrance QuestionsDocument5 pagesSample Adam Entrance QuestionsMóhãmmèd Rífâz 21No ratings yet
- Electronic Car HornDocument2 pagesElectronic Car HornViraj ShirodkarNo ratings yet
- Caudalimetro PDFDocument66 pagesCaudalimetro PDFLa Mariposa Jana M LNo ratings yet
- Graphs, functions, and compositionDocument2 pagesGraphs, functions, and compositionRdmstNo ratings yet
- SkipDocument6 pagesSkipSwapnaNo ratings yet
- Foundation, Electric Installation, Operation, and Maintenance GuideDocument32 pagesFoundation, Electric Installation, Operation, and Maintenance Guideapi-279886039No ratings yet
- Tda 1591Document20 pagesTda 1591Brzata PticaNo ratings yet
- User Manual Inovance Md300TDocument96 pagesUser Manual Inovance Md300Talextugas_rpi100% (2)
- VORON2.4R2 SPIDER V22 WiringDocument1 pageVORON2.4R2 SPIDER V22 WiringLeibniz GriegNo ratings yet
- ANSI IEEE C63.5 ( (Electromagnetic CompatibilitDocument73 pagesANSI IEEE C63.5 ( (Electromagnetic Compatibilitoyavuz38No ratings yet
- 8 Luminaria Led Plafon Circul Ados 20W 220-240V 6500K Ip65 CFW WT045CDocument2 pages8 Luminaria Led Plafon Circul Ados 20W 220-240V 6500K Ip65 CFW WT045CICI Consultores & EjecutoresNo ratings yet
- Helioscope Commercial 101Document5 pagesHelioscope Commercial 101Ankit kumarNo ratings yet
- D 1501 Service Manual: DevelopDocument229 pagesD 1501 Service Manual: DevelopJoel RodriguesNo ratings yet
- Eur. Phys. J. Plus (2016) 131 - 87 - Albedo FactorsDocument10 pagesEur. Phys. J. Plus (2016) 131 - 87 - Albedo Factorsjassi21No ratings yet
- Chapter 8 Small Sinal Analysis of FETDocument46 pagesChapter 8 Small Sinal Analysis of FETsakibNo ratings yet
- Elebtikartech - 2 MVA OfferDocument7 pagesElebtikartech - 2 MVA Offerاحمد العبيديNo ratings yet